
I have been thinking about Robot wheels for my robot projects and realized that there are a lot of options.
So, I wanted to spend some time researching and document out the options as well as the pros and cons of each holistically.
Based on my current knowledge I believe I need a stepper motor to power the wheel but again I’m not completely aware of all the options so I felt it was worth researching and documenting to be sure that I’m fully considering everything before committing to one direction.
Earlier on I bought a rigid caster (including wheel, fork, and base plate) from my local hardware store. The whole item is about 6.5 inches (165.1 mm) in height and the wheel itself is about 5 inches (127 mm). However, although it has the load capacity that I want (300 lbs.) it seems like I need to do a lot of work to attach a motor to it. There are a lot of wheels out there and several that are specifically intended for robotics. So, my thought is to list my requirements and compare to the options available to make the best decision.
Motors:
What are differences between motors?
- Torque – the force to rotate about an axis, fulcrum, or pivot.
- Power consumption – energy required to operate the motor.
- Accuracy – degree in measurement for motion can be determined to which the final position matches the command position.
- Repeatability – drive mechanism’s ability to move to the same position multiple times under ideal conditions.
- Cost – amount to purchase the motor from the manufacturer or parts to build the motor.
What are my motor requirements?
- The frame cannot touch the ground as it would stop or at least imped the wheel movement
- Has to generate enough torque to make the wheel turn
- Able to be strong enough to rotate the the caster base plate to make the wheel change direction.
Motor Types:
AC Motors:

Synchronous:
Constant-speed motors that operate in synchronism with AC line frequency and are commonly used where precise constant speed is required.
Asynchronous:
An example of an asynchronous motor is an induction motor.
Pros:
- Lower startup power demands
- Better control over starting current levels and acceleration
- Broader customizability for different configuration requirements and changing speed and torque requirements
- Greater durability and longevity
Use Cases:
In the industrial sector, the durability, flexibility, and efficiency of AC motors make them ideal for use in applications for a wide range of devices, including appliances, compressors, computers, conveyors, fans and other HVAC equipment, pumps, and transportation equipment.
DC Motors:
Pros:
- Higher startup power and torque
- Faster response times for start/stop and acceleration
- Wider variety for different voltage requirements
Cons:
None identified yet
Use Cases:
The faster response times and more stable torque and speed levels offered by DC motors make them well-suited for use in fabrication and production equipment, elevators, vacuums, and material handling equipment.
There are a few different types: (1) Brushed (2) Brushless (3) Geared
Brushed DC Motors

The Brush DC motors consist of six different components: axle, commutator, armature, stator, magnets, and brushes.
Pros:
The brush DC motors have the ability to provide the torque three to four times greater than their rated torque.
Cons:
None identified yet
Brushless DC Motors

Pros:
Brushless motors can operate more efficiently and at higher speeds than conventional DC motors.
Cons:
None identified yet
DC Gear Motors:

The geared DC motors are an advanced variation of the brush DC motors. They have a gear assembly attached to the motor. The speed of the motor is measured in Rotation Per Minute (RPM). The speed of the motor is reduced with an increase in torque with the help of gear assembly. By using a correct combination of the gears to motor the speed of the DC motor can be reduced with an increase in torque. This provides stability in the rotation of the motor and the motor can be stopped or changed speed in a controlled manner.
Pros:
Often used because of the ease of controlling speed and direction.
Cons:
Conventional motors have slower speed but used with batter oriented applications
Stepper Motors:
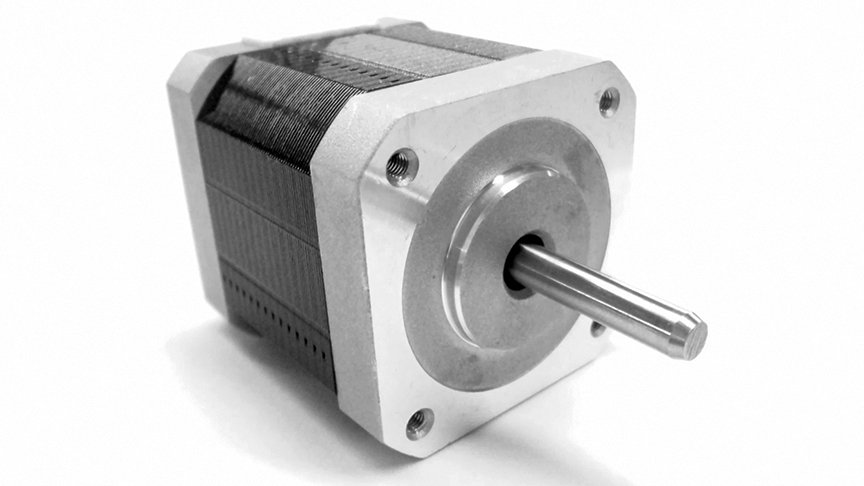
A stepper motor divides the rotation into multiple steps. Like the servo motor rotates by a specific angle, a stepper motor rotates by a specific number of angular steps.
Pros:
Cheaper and are generally more available than stepper motors.
Cons:
Consumes power even in resting just by locking and holding the commanded position.
Use Cases:
Stepper motors are used in robotic arms.
Pager Motors:
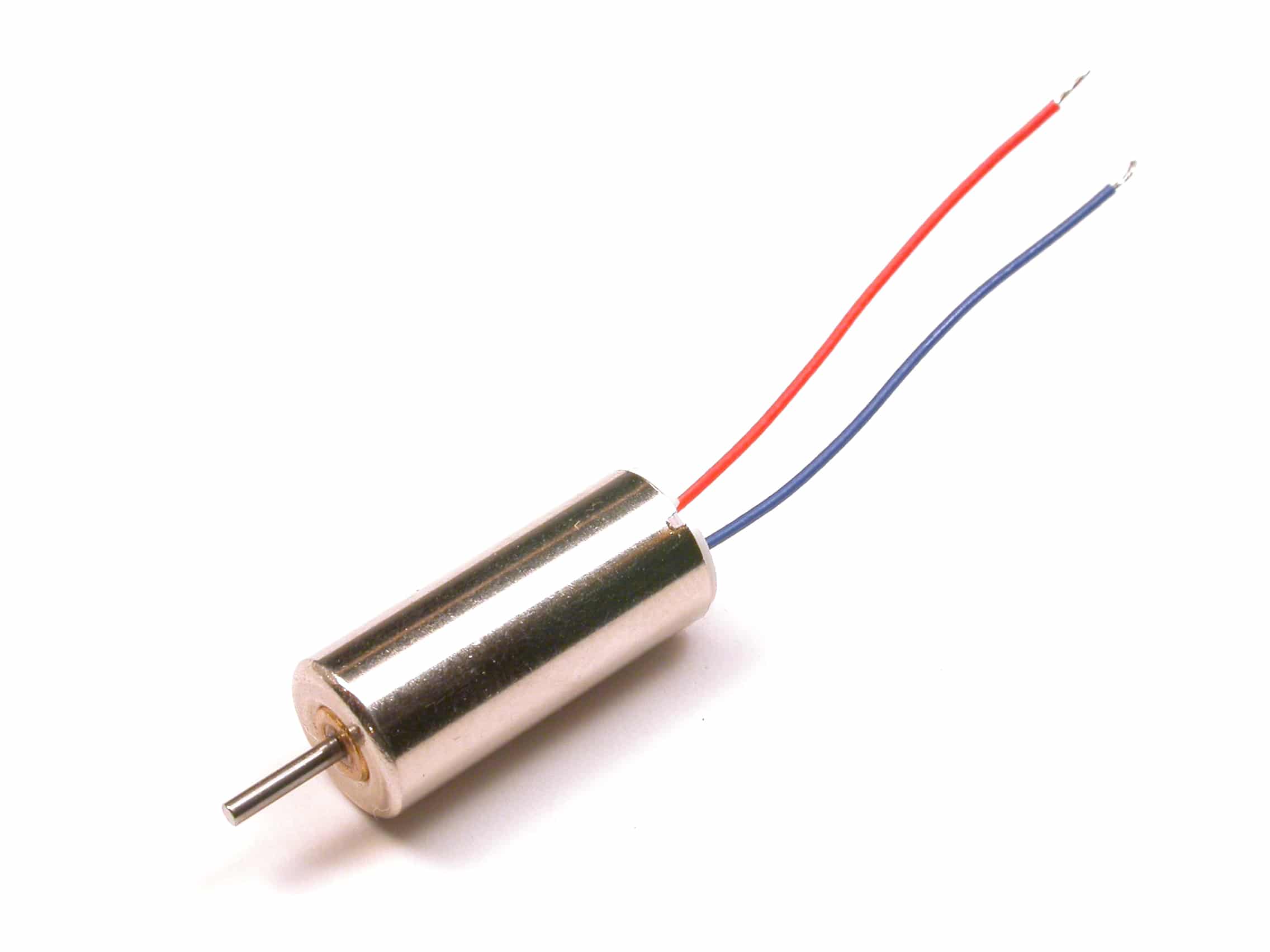
Pros:
If I need a small motor for some reason this could be useful.
Cons:
However, for my immediate needs (working with a wheel) this is too small
Servo Motors:

Servo motors are normally used where precise rotational motion is required. They are frequently used in robotic arms and angle control applications.
Pros:
Generates enough torque to move an object quickly from halt position
Consumes less power than Stepper Motors
Because of the closed-loop system, a servo motor can operate with a specific motion profile that is programmed into the controller.
Cons:
None identify yet
Additional Notes:
Lowering the voltage to a motor can also slow it down to a more desirable speed. Only experimentation can determine if your motor will operate with a lower voltage. If it does, you’ve saved yourself a lot of trouble, if not, there are other ways of slowing down motors. Some high-speed motors can be used if worm gears or screw gears are used.
Use Cases:
Servo motor applications are most commonly used in closed loop systems where precise position control commonly found in industrial and commercial applications.
Conclusions:
Since I need faster torque and response time a DC motor would be best for my needs. Additionally, they are applied to my use case for organizations today. So, I should do the same.
What do I need for the wheels?
- Wheels have to be tall enough so that the base is high enough off the ground and can support the top heaviness of the load that its carrying
- Load capacity of around 100 to 300 lbs. I think for my use cases (i.e. carrying trash, laundry, groceries, traveling bags, or yard waste) around 100 pounds is sufficient but I think that I should plan for a little more than I need just in case. The ideal is the max industrial load capacity but I have budget constraints and if the use cases are far below the load capacity then it is inefficient allocation of cost.
- Ability to go off road.
Wheel Types:
Rigid Caster

Swivel Caster

Precision Disk Wheel

Rubber Wheels

Mecanum Wheel

Pros:
These wheels can go diagonal and sideways without tyrning
Cons:
Expensive
Need to mount the motor on a frame with a shaft and hub.

I know this if off topic but I’m looking into starting my own blog and was wondering what all is needed to get set up? I’m assuming having a blog like yours would cost a pretty penny? I’m not very internet smart so I’m not 100 sure. Any tips or advice would be greatly appreciated. Thanks